
The articulated jib crane is a special type of jib crane with an additional joint in the jib. The joint reduces the jib radius—for example to pass obstacles and, to a limited extent, to work behind the crane column, as shown in the sketch below. The grey area shows the large working zone of the articulated jib:

The joint position can be adapted to specific work areas for optimum, low-effort operation. Unlike a jib with a travelling hoist, the load attachment of the articulated jib is always at the end of the outer arm. This is especially advantageous with a rope hoist or rope balancer: the balancer drive is mounted on the outer arm or near the column and the rope is led over sheaves to the end of the outer arm. The operator does not have to move the mass of the hoist, reducing effort when moving the jib. Omitting the hoist increases available hook height by the hoist dimensions—particularly valuable in low rooms and enabling use of a lifting aid.

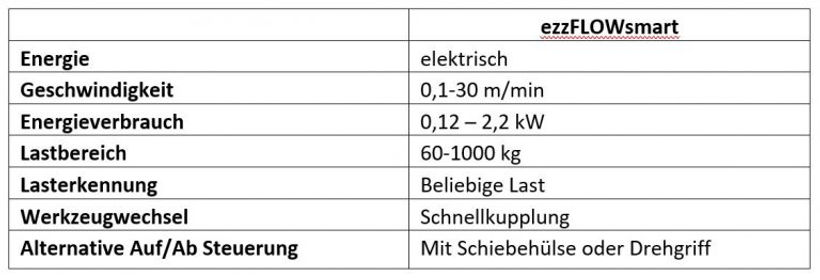
With the combination of ezzFLOWsmart balancer and ezzLINKeco articulated jib crane, Best Handling Technology offers a proven compact handling system. The ezzFLOWsmart is electrically driven and ideal for precisely positioning, assembling, or joining sensitive products. This intuitive system adapts perfectly to the user and the task.

Typical applications for the ezzFLOWsmart include handling during joining and assembly—for example machine, apparatus, and vehicle assembly, component and subassembly assembly, machine tool loading, and support for engines, gearboxes, couplings, and tool changeover, plus many other precise handling tasks.
Because the balancer holds the workpiece in float, the operator can focus on the task and precision while guiding the part directly with both hands.
An adaptable, ergonomic handling system with articulated jib and balancer
Fine tuning of the balancer—programming delay times, return movements, and speeds—can be done on site at the display. No PC connection or waiting times; the ezzFLOWsmart offers maximum flexibility.
There are no jerky lifting/lowering movements or shock loads, and operation is vibration-free.
The electric control of the ezzFLOWsmart is developed and manufactured in Germany for maximum flexibility in customer-specific adaptations. Programming options allow integration into higher-level line control and precise adaptation to the handling task.
All ezzFLOW variants are equipped with optimised end effectors for the task. The right attachment is crucial for safe, intuitive, fast picking. For smooth surfaces, vacuum cups are an option; one or more cups are arranged for stable lifting.
Electric and pneumatic vacuum generation are available. Besides on-site resources, energy cost is a selection criterion.
Pneumatic vacuum generators run only during lifting and consume compressed air only then. Electric vacuum pumps generally have lower energy cost but run continuously. The right choice depends on the application.

The optimal handling system should be defined by our specialists, taking all on-site conditions into account when selecting equipment.